LET'S TALK-A-BOT IT
|
|
|
|
|
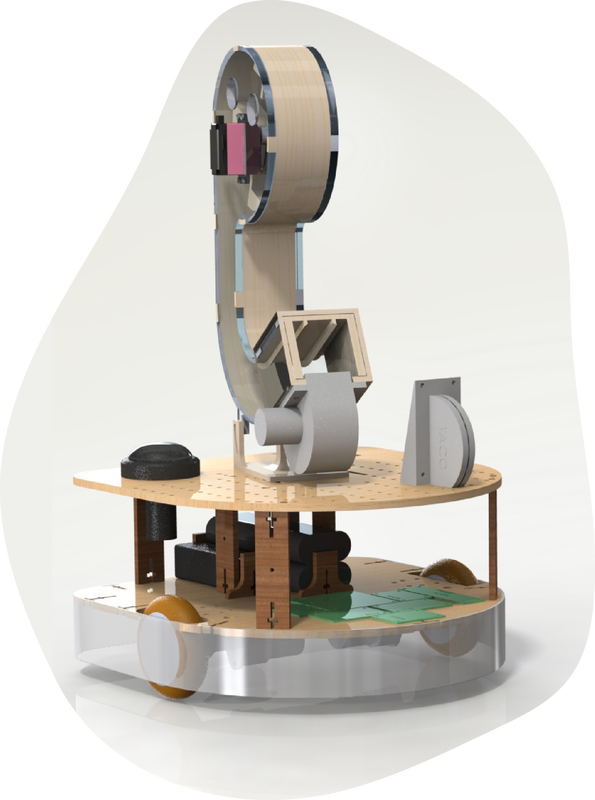
Final Product Rendering
|
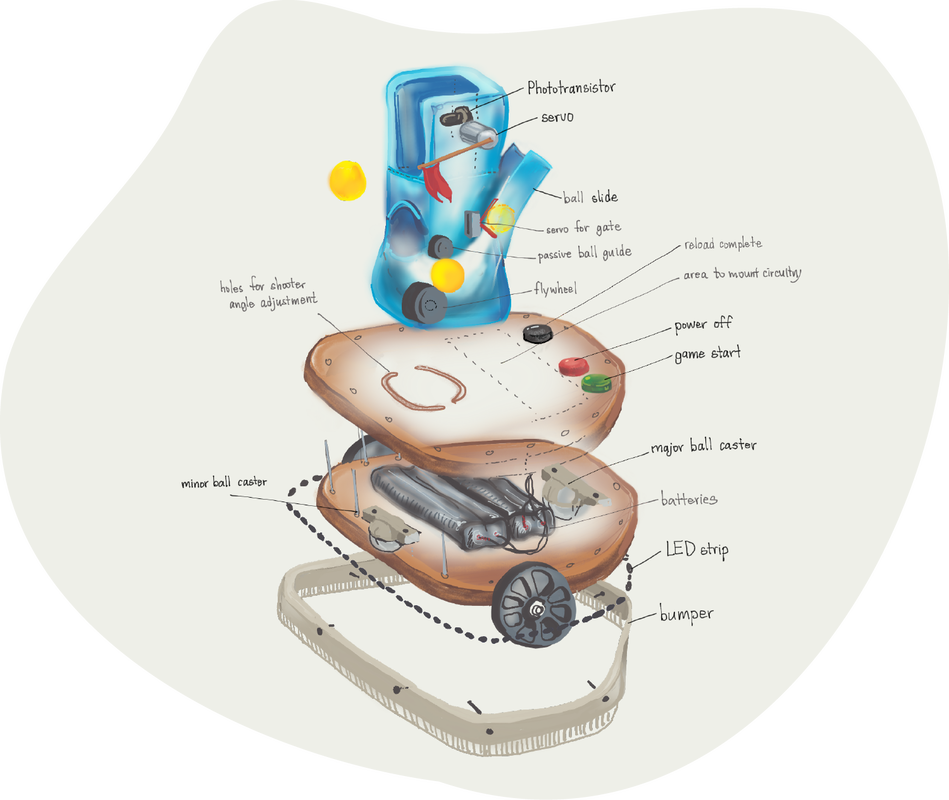
Original Concept Expanded View Sketch
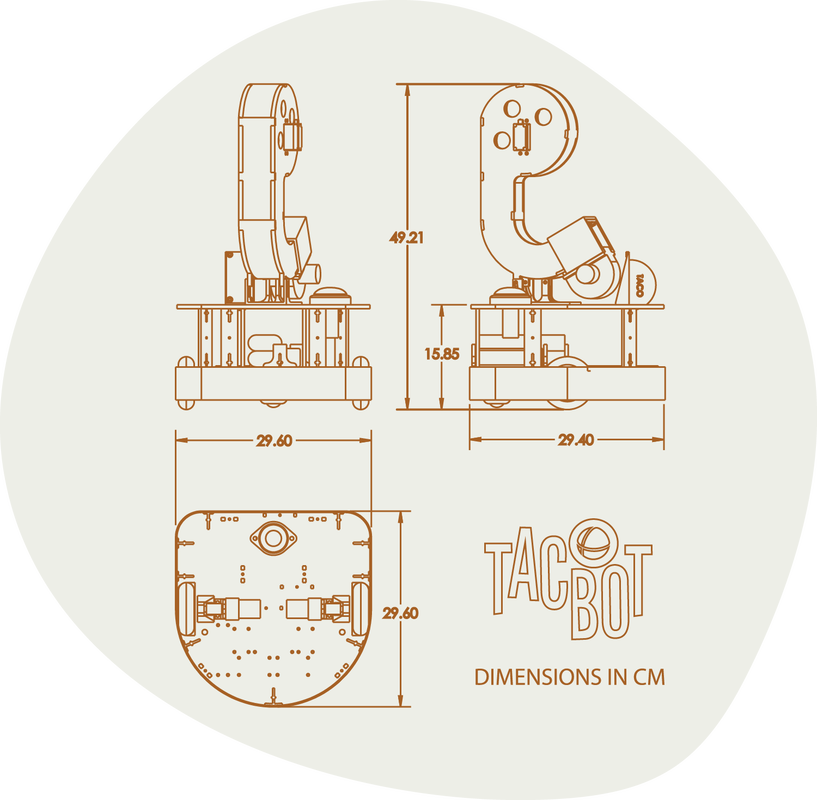
Overall Dimensions
|
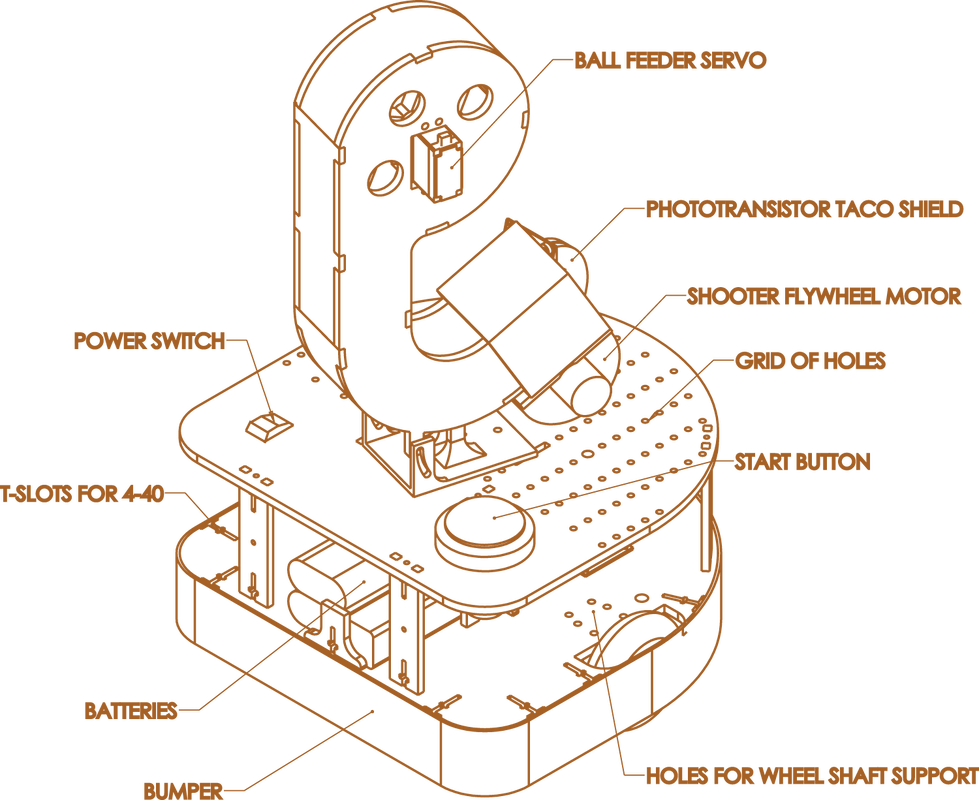
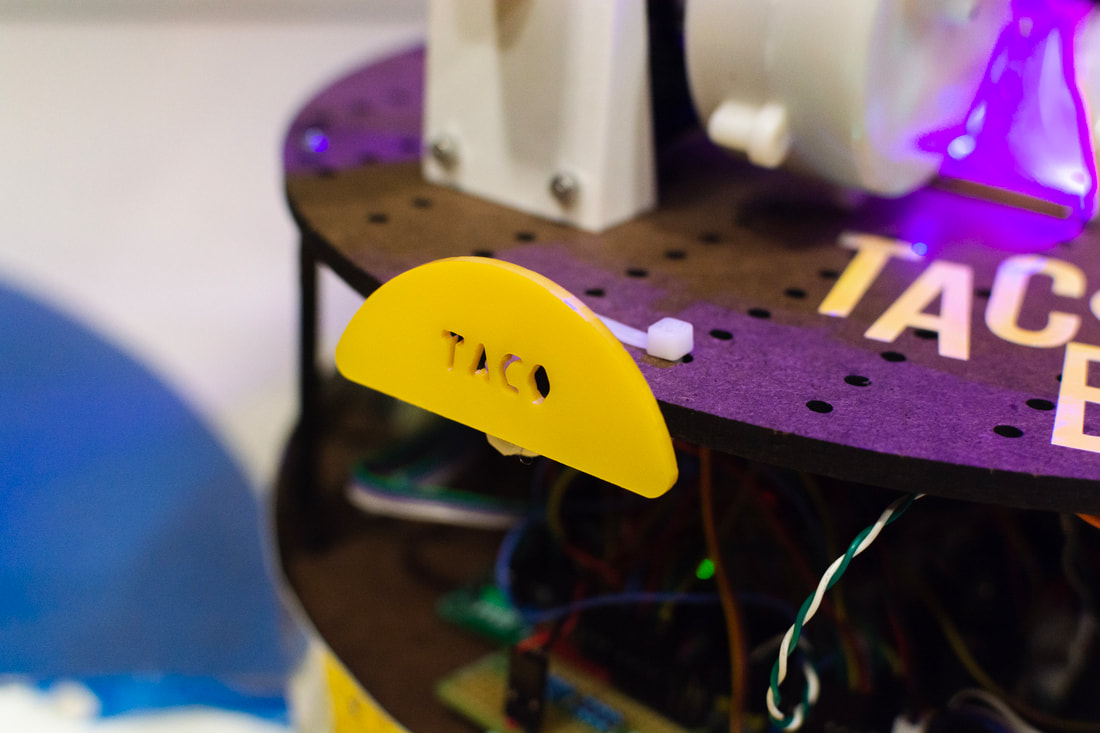
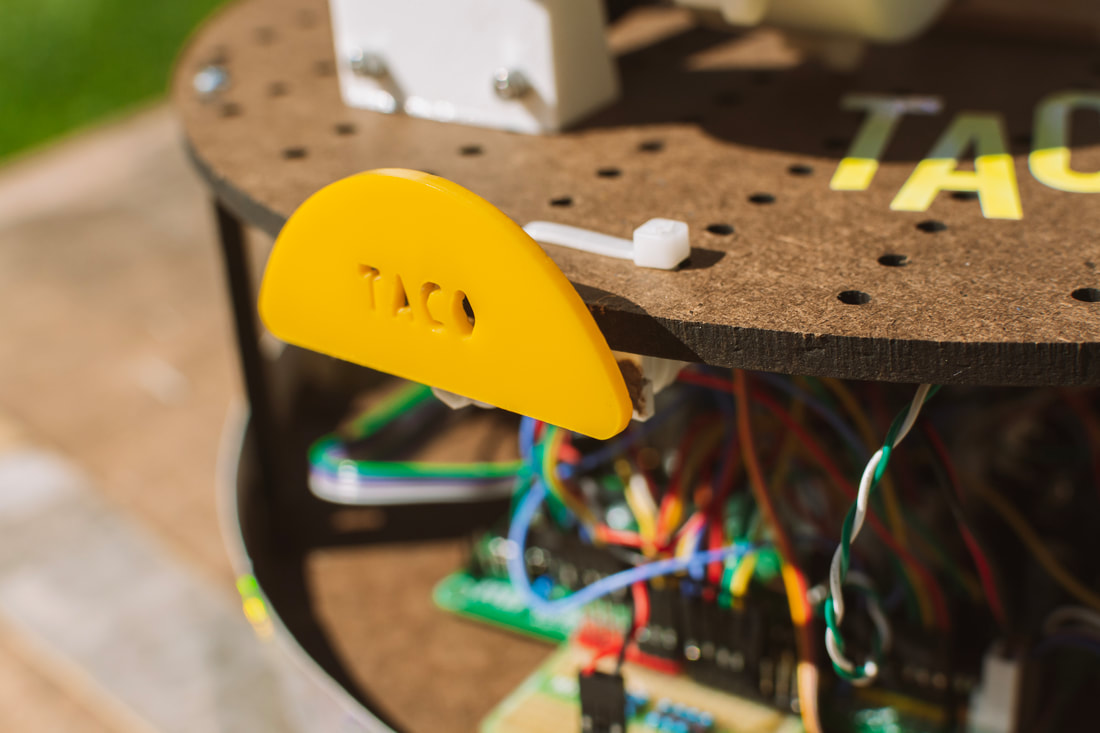
Using the grid of holes on the top plate, the game status indicator taco servo is simply zip tied to a secure fit. When the game is in play, the taco flips right-side up cause it's always the right time for taco time.
|
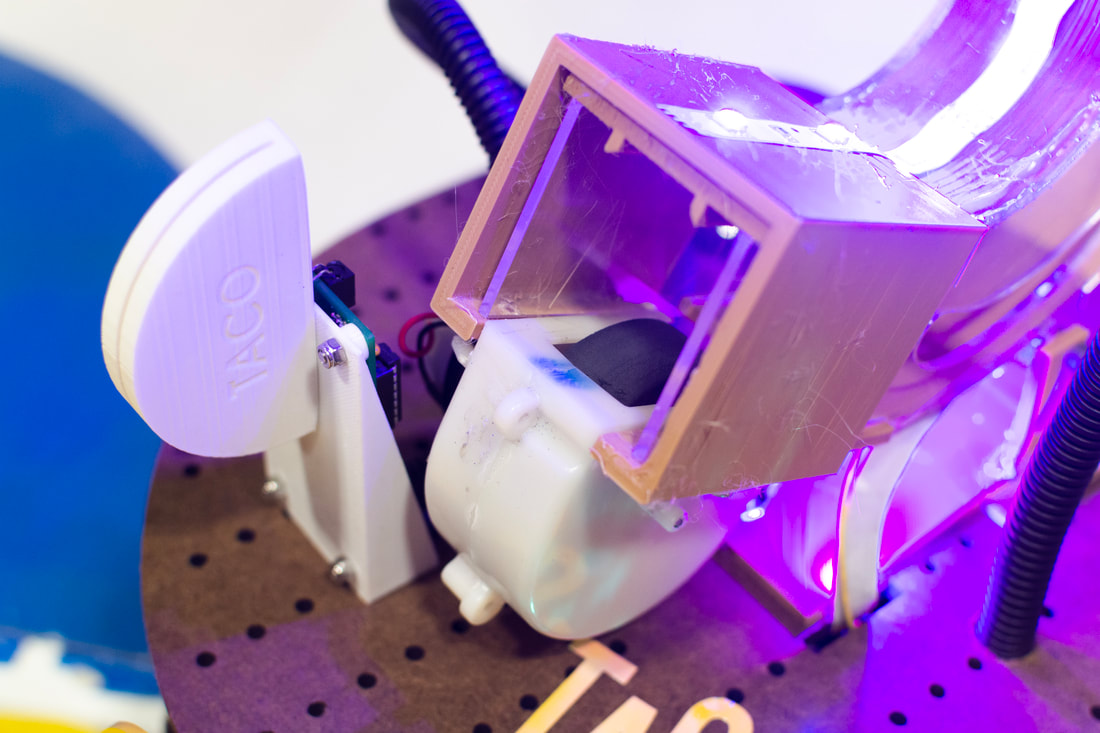
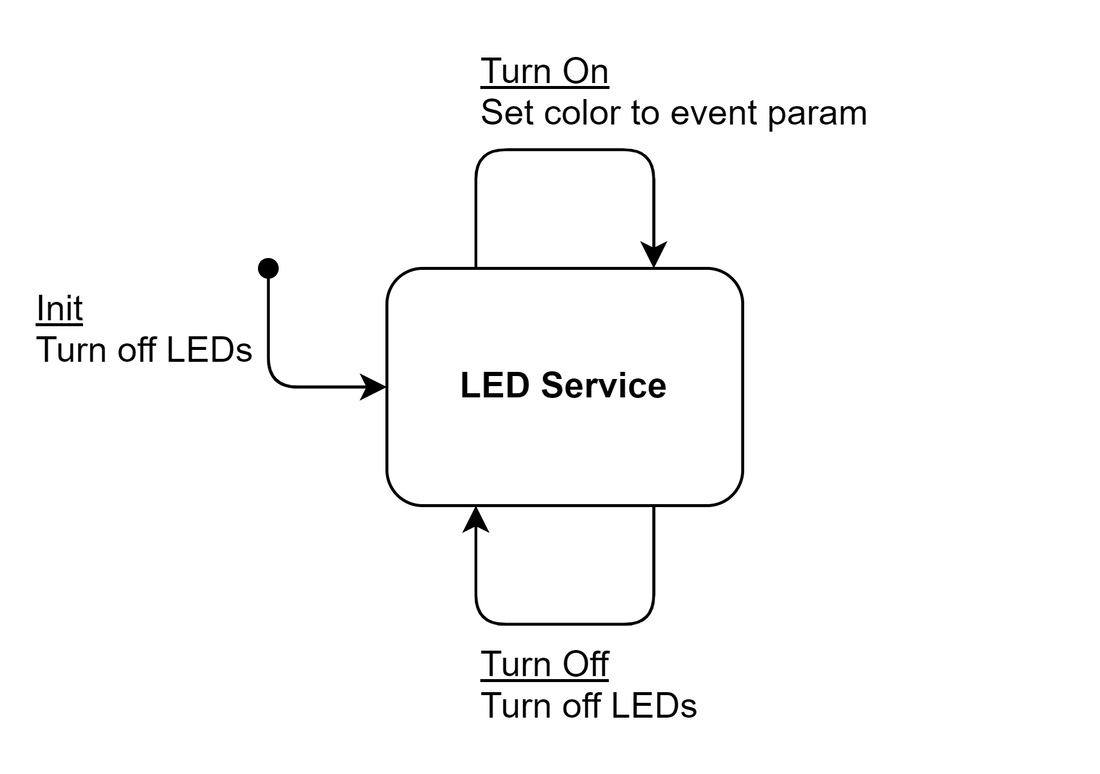
The LED strip illuminates the shooter in purple when the game is started and then acts as the team status indicator by shining either red or blue.
|

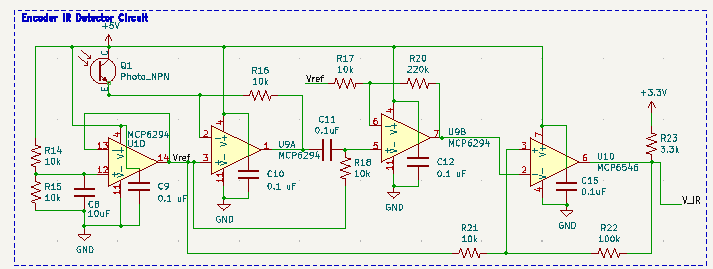
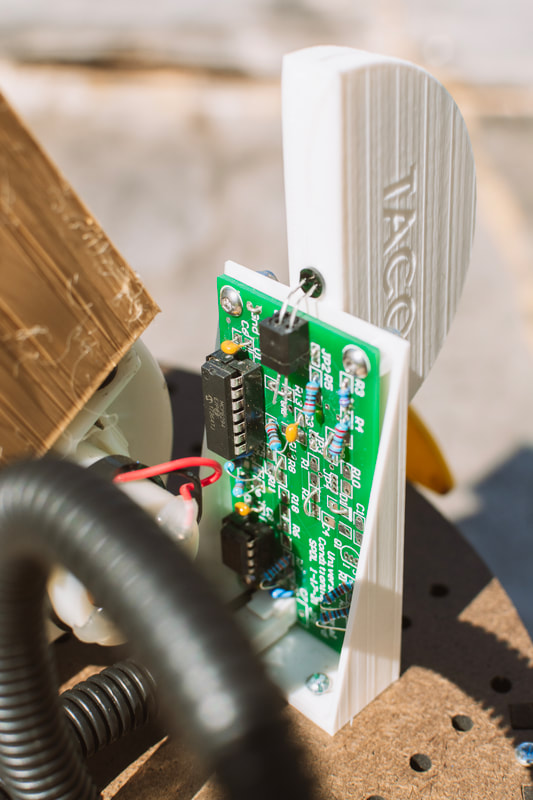
The phototransistor is stuffed in the narrow slit of the 3D printed taco. The slit restricts the horizontal and angular window of infrared light coming from arcade basket beacons, allowing TacoBot to use infrared light detection as an alignment indicator.
|
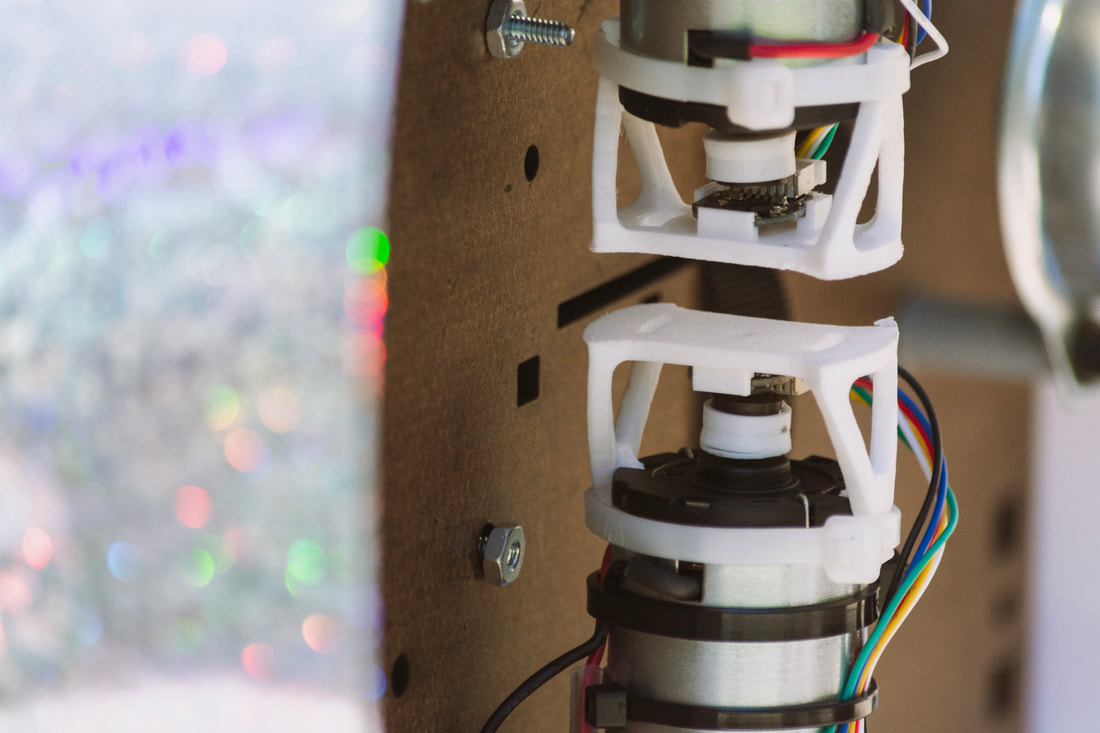
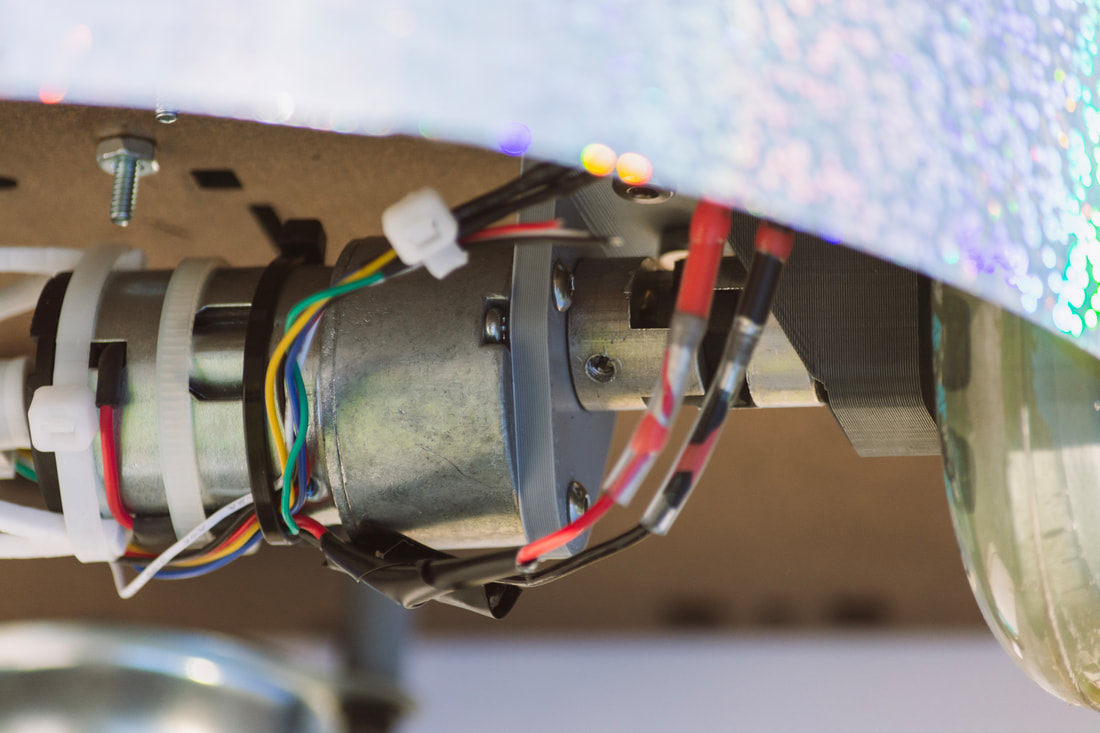
The magnetic encoder consists of two parts and requires a custom 3D printed mount in order to both secure it to the DC motors as well as create a small physical gap between the spinning magnet and board.
|

Game restrictions limit us to reloading with three balls each time and most servos have a maximum range of 270 degrees, so we dedicated 90 degrees to each ball and set the starting position such that the first ball was barely restrained from falling with gravity down towards the flywheel.
|
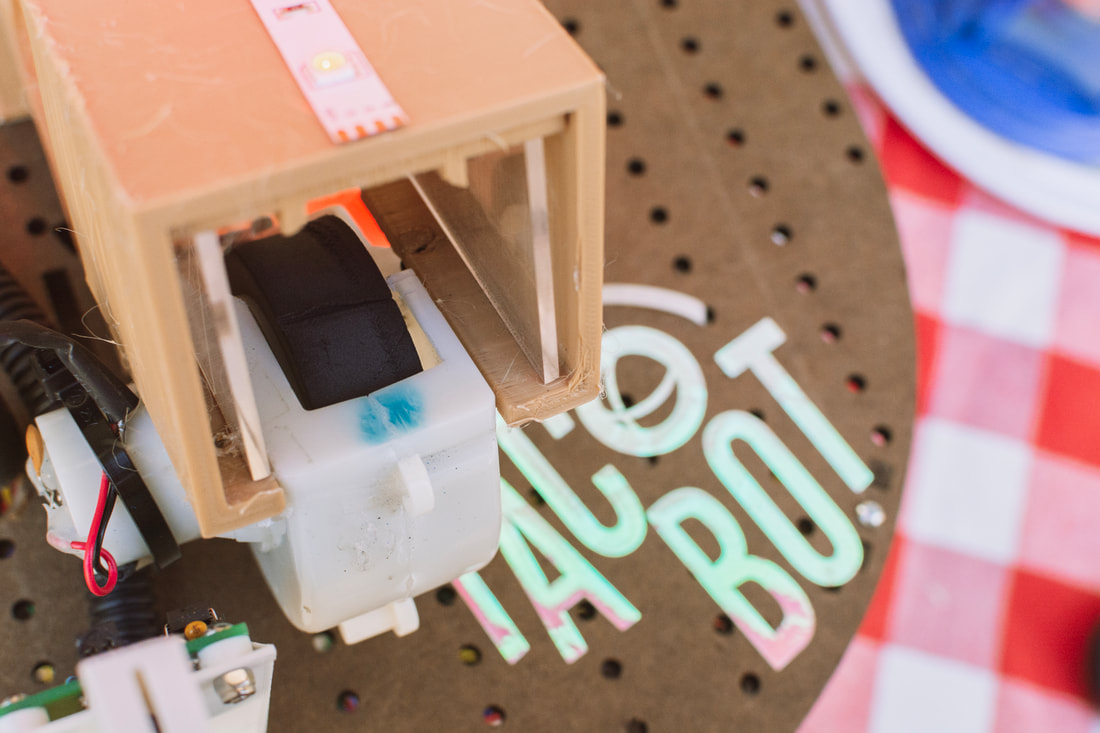
Inside the shooter, there are two inner railings to help increase positional precision with three-point contact when the ball gets slightly compressed between the railings and the flywheel motor.
|
leading PIC32 |
|
|
|
|
|
TacoBot Ⓒ2022 |